New simulation predicts human-tech interaction in assistive devices
Collaborators

Wearable robots and assistive devices hold the potential to help people with mobility issues move better and with less effort. But predicting how a device and human will interact is far from easy, especially given the unique nature of how individuals respond to the same device. A team at Stanford University believe a better tool to predict outcomes is needed to accelerate the design of these devices and turn them into reality.
“In this study, we created a simulation framework that can dive deep into the mechanisms of how a human interacts and adapts to a device,” said Wu Tsai Human Performance member Jon Stingel, a PhD candidate in mechanical engineering at Stanford University’s Neuromuscular Biomechanics Lab. “We can get really low-level details about what is happening with the runner and device much easier than with a traditional experiment.”

The team tested a musculoskeletal simulation framework on seven runners to understand how a person saves energy when using a simple device: a springy cord (called an exotendon) attached to a person’s shoelaces. Although the device is relatively basic, “the human response to it was neither simple nor predictable,” wrote the researchers in IEEE Robotics and Automation Letters.
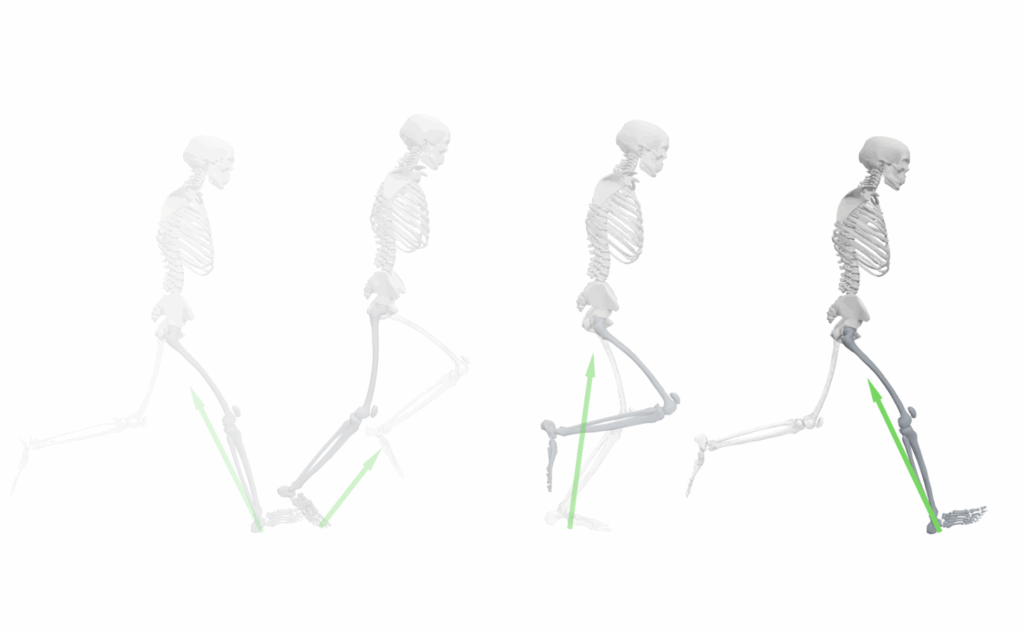
Runners automatically changed how they ran to make the most of the spring’s help. This adjustment not only reduced the work their muscles did but also lowered the heat generated by their muscles. During running, there are two main phases: when your foot is on the ground (stance phase) and when it’s not touching the ground (swing phase). So where in the run phase did the energy saving come from?
“During the stance phase is when we generally spend most of our energy, and the exotendon allowed us to run in a way that reduced that energy expenditure,” said Stingel. “Runners tended to run without flexing their knees as much, which gave their quadriceps muscles a break.” The exotendon also reduced the effort of their hip flexors, hamstrings, and other muscle groups.
This study reveals how complex the connection between wearable devices and our bodies can be, and moves us closer to using simulations to design better devices.
To learn more, read the publication in IEEE Robotics and Automation Letters.
This work is part of the Alliance’s Digital Athlete Moonshot to create predictive models to guide training and treatment for athletes. Co-authors include Jennifer L. Hicks, Scott D. Uhlrich, & Scott L. Delp.
Image credit: Cara Welker and Cole Simpson.
Latest News

January 14, 2026
Four Key Nutrition Strategies for Women in Sport
January 7, 2026
Foundation AI model is transforming analysis of walking and running dynamics

December 10, 2025
Study suggests how eccentric resistance exercises might strengthen tendons
Get Engaged
Join our mailing list to receive the latest information and updates on the Wu Tsai Human Performance Alliance.